Code
import math, copy
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('deeplearning.mplstyle')
from lab_utils_uni import plt_house_x, plt_contour_wgrad, plt_divergence, plt_gradientsyou’ll take a look how the gradient for linear cost is calculated in code. This will be useful to look at because you will implement this in the practice lab at the end of the week.
After you run gradient descent in the lab, there will be a nice set of animated plots that show gradient descent in action. You’ll see the sigmoid function, the contour plot of the cost, the 3D surface plot of the cost, and the learning curve all evolve as gradient descent runs
This Gradient Descent for Linear Regression is part of DeepLearning.AI course: Machine Learning Specialization / Course 1: Supervised Machine Learning: Regression and Classification In this course we will learn the difference between supervised and unsupervised learning and regression and classification tasks. Develop a linear regression model. Understand and implement the purpose of a cost function. Understand and implement gradient descent as a machine learning training method.
This is my learning experience of data science through DeepLearning.AI. These repository contributions are part of my learning journey through my graduate program masters of applied data sciences (MADS) at University Of Michigan, DeepLearning.AI, Coursera & DataCamp. You can find my similar articles & more stories at my medium & LinkedIn profile. I am available at kaggle & github blogs & github repos. Thank you for your motivation, support & valuable feedback.
These include projects, coursework & notebook which I learned through my data science journey. They are created for reproducible & future reference purpose only. All source code, slides or screenshot are intellectual property of respective content authors. If you find these contents beneficial, kindly consider learning subscription from DeepLearning.AI Subscription, Coursera, DataCamp
In this lab, you will: - automate the process of optimizing \(w\) and \(b\) using gradient descent.
In this lab, we will make use of: - NumPy, a popular library for scientific computing - Matplotlib, a popular library for plotting data - plotting routines in the lab_utils.py file in the local directory
import math, copy
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('deeplearning.mplstyle')
from lab_utils_uni import plt_house_x, plt_contour_wgrad, plt_divergence, plt_gradientsLet’s use the same two data points as before - a house with 1000 square feet sold for \$300,000 and a house with 2000 square feet sold for \$500,000.
| Size (1000 sqft) | Price (1000s of dollars) |
|---|---|
| 1 | 300 |
| 2 | 500 |
# Load our data set
x_train = np.array([1.0, 2.0]) #features
y_train = np.array([300.0, 500.0]) #target value### Compute_Cost This was developed in the last lab. We’ll need it again here.
#Function to calculate the cost
def compute_cost(x, y, w, b):
m = x.shape[0]
cost = 0
for i in range(m):
f_wb = w * x[i] + b
cost = cost + (f_wb - y[i])**2
total_cost = 1 / (2 * m) * cost
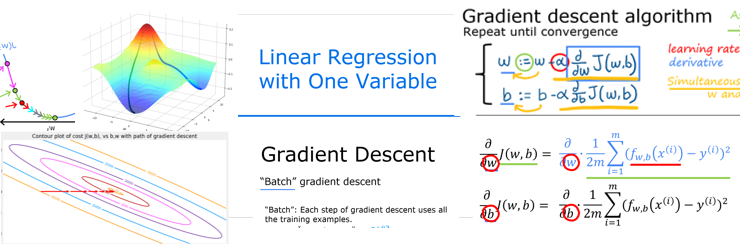
return total_cost## Gradient descent summary So far in this course, you have developed a linear model that predicts \(f_{w,b}(x^{(i)})\): \[f_{w,b}(x^{(i)}) = wx^{(i)} + b \tag{1}\] In linear regression, you utilize input training data to fit the parameters \(w\),\(b\) by minimizing a measure of the error between our predictions \(f_{w,b}(x^{(i)})\) and the actual data \(y^{(i)}\). The measure is called the \(cost\), \(J(w,b)\). In training you measure the cost over all of our training samples \(x^{(i)},y^{(i)}\) \[J(w,b) = \frac{1}{2m} \sum\limits_{i = 0}^{m-1} (f_{w,b}(x^{(i)}) - y^{(i)})^2\tag{2}\]
In lecture, gradient descent was described as:
\[\begin{align*} \text{repeat}&\text{ until convergence:} \; \lbrace \newline \; w &= w - \alpha \frac{\partial J(w,b)}{\partial w} \tag{3} \; \newline b &= b - \alpha \frac{\partial J(w,b)}{\partial b} \newline \rbrace \end{align*}\] where, parameters \(w\), \(b\) are updated simultaneously. The gradient is defined as: \[ \begin{align} \frac{\partial J(w,b)}{\partial w} &= \frac{1}{m} \sum\limits_{i = 0}^{m-1} (f_{w,b}(x^{(i)}) - y^{(i)})x^{(i)} \tag{4}\\ \frac{\partial J(w,b)}{\partial b} &= \frac{1}{m} \sum\limits_{i = 0}^{m-1} (f_{w,b}(x^{(i)}) - y^{(i)}) \tag{5}\\ \end{align} \]
Here simultaniously means that you calculate the partial derivatives for all the parameters before updating any of the parameters.
## Implement Gradient Descent You will implement gradient descent algorithm for one feature. You will need three functions. - compute_gradient implementing equation (4) and (5) above - compute_cost implementing equation (2) above (code from previous lab) - gradient_descent, utilizing compute_gradient and compute_cost
Conventions: - The naming of python variables containing partial derivatives follows this pattern,\(\frac{\partial J(w,b)}{\partial b}\) will be dj_db. - w.r.t is With Respect To, as in partial derivative of \(J(wb)\) With Respect To \(b\).
### compute_gradient compute_gradient implements (4) and (5) above and returns \(\frac{\partial J(w,b)}{\partial w}\),\(\frac{\partial J(w,b)}{\partial b}\). The embedded comments describe the operations.
def compute_gradient(x, y, w, b):
"""
Computes the gradient for linear regression
Args:
x (ndarray (m,)): Data, m examples
y (ndarray (m,)): target values
w,b (scalar) : model parameters
Returns
dj_dw (scalar): The gradient of the cost w.r.t. the parameters w
dj_db (scalar): The gradient of the cost w.r.t. the parameter b
"""
# Number of training examples
m = x.shape[0]
dj_dw = 0
dj_db = 0
for i in range(m):
f_wb = w * x[i] + b
dj_dw_i = (f_wb - y[i]) * x[i]
dj_db_i = f_wb - y[i]
dj_db += dj_db_i
dj_dw += dj_dw_i
dj_dw = dj_dw / m
dj_db = dj_db / m
return dj_dw, dj_db The lectures described how gradient descent utilizes the partial derivative of the cost with respect to a parameter at a point to update that parameter. Let’s use our
The lectures described how gradient descent utilizes the partial derivative of the cost with respect to a parameter at a point to update that parameter. Let’s use our compute_gradient function to find and plot some partial derivatives of our cost function relative to one of the parameters, \(w_0\).
plt_gradients(x_train,y_train, compute_cost, compute_gradient)
plt.show()
Above, the left plot shows \(\frac{\partial J(w,b)}{\partial w}\) or the slope of the cost curve relative to \(w\) at three points. On the right side of the plot, the derivative is positive, while on the left it is negative. Due to the ‘bowl shape’, the derivatives will always lead gradient descent toward the bottom where the gradient is zero.
The left plot has fixed \(b=100\). Gradient descent will utilize both \(\frac{\partial J(w,b)}{\partial w}\) and \(\frac{\partial J(w,b)}{\partial b}\) to update parameters. The ‘quiver plot’ on the right provides a means of viewing the gradient of both parameters. The arrow sizes reflect the magnitude of the gradient at that point. The direction and slope of the arrow reflects the ratio of \(\frac{\partial J(w,b)}{\partial w}\) and \(\frac{\partial J(w,b)}{\partial b}\) at that point. Note that the gradient points away from the minimum. Review equation (3) above. The scaled gradient is subtracted from the current value of \(w\) or \(b\). This moves the parameter in a direction that will reduce cost.
### Gradient Descent Now that gradients can be computed, gradient descent, described in equation (3) above can be implemented below in gradient_descent. The details of the implementation are described in the comments. Below, you will utilize this function to find optimal values of \(w\) and \(b\) on the training data.
def gradient_descent(x, y, w_in, b_in, alpha, num_iters, cost_function, gradient_function):
"""
Performs gradient descent to fit w,b. Updates w,b by taking
num_iters gradient steps with learning rate alpha
Args:
x (ndarray (m,)) : Data, m examples
y (ndarray (m,)) : target values
w_in,b_in (scalar): initial values of model parameters
alpha (float): Learning rate
num_iters (int): number of iterations to run gradient descent
cost_function: function to call to produce cost
gradient_function: function to call to produce gradient
Returns:
w (scalar): Updated value of parameter after running gradient descent
b (scalar): Updated value of parameter after running gradient descent
J_history (List): History of cost values
p_history (list): History of parameters [w,b]
"""
# An array to store cost J and w's at each iteration primarily for graphing later
J_history = []
p_history = []
b = b_in
w = w_in
for i in range(num_iters):
# Calculate the gradient and update the parameters using gradient_function
dj_dw, dj_db = gradient_function(x, y, w , b)
# Update Parameters using equation (3) above
b = b - alpha * dj_db
w = w - alpha * dj_dw
# Save cost J at each iteration
if i<100000: # prevent resource exhaustion
J_history.append( cost_function(x, y, w , b))
p_history.append([w,b])
# Print cost every at intervals 10 times or as many iterations if < 10
if i% math.ceil(num_iters/10) == 0:
print(f"Iteration {i:4}: Cost {J_history[-1]:0.2e} ",
f"dj_dw: {dj_dw: 0.3e}, dj_db: {dj_db: 0.3e} ",
f"w: {w: 0.3e}, b:{b: 0.5e}")
return w, b, J_history, p_history #return w and J,w history for graphing# initialize parameters
w_init = 0
b_init = 0
# some gradient descent settings
iterations = 10000
tmp_alpha = 1.0e-2
# run gradient descent
w_final, b_final, J_hist, p_hist = gradient_descent(x_train ,y_train, w_init, b_init, tmp_alpha,
iterations, compute_cost, compute_gradient)
print(f"(w,b) found by gradient descent: ({w_final:8.4f},{b_final:8.4f})")Iteration 0: Cost 7.93e+04 dj_dw: -6.500e+02, dj_db: -4.000e+02 w: 6.500e+00, b: 4.00000e+00
Iteration 1000: Cost 3.41e+00 dj_dw: -3.712e-01, dj_db: 6.007e-01 w: 1.949e+02, b: 1.08228e+02
Iteration 2000: Cost 7.93e-01 dj_dw: -1.789e-01, dj_db: 2.895e-01 w: 1.975e+02, b: 1.03966e+02
Iteration 3000: Cost 1.84e-01 dj_dw: -8.625e-02, dj_db: 1.396e-01 w: 1.988e+02, b: 1.01912e+02
Iteration 4000: Cost 4.28e-02 dj_dw: -4.158e-02, dj_db: 6.727e-02 w: 1.994e+02, b: 1.00922e+02
Iteration 5000: Cost 9.95e-03 dj_dw: -2.004e-02, dj_db: 3.243e-02 w: 1.997e+02, b: 1.00444e+02
Iteration 6000: Cost 2.31e-03 dj_dw: -9.660e-03, dj_db: 1.563e-02 w: 1.999e+02, b: 1.00214e+02
Iteration 7000: Cost 5.37e-04 dj_dw: -4.657e-03, dj_db: 7.535e-03 w: 1.999e+02, b: 1.00103e+02
Iteration 8000: Cost 1.25e-04 dj_dw: -2.245e-03, dj_db: 3.632e-03 w: 2.000e+02, b: 1.00050e+02
Iteration 9000: Cost 2.90e-05 dj_dw: -1.082e-03, dj_db: 1.751e-03 w: 2.000e+02, b: 1.00024e+02
(w,b) found by gradient descent: (199.9929,100.0116) Take a moment and note some characteristics of the gradient descent process printed above.
Take a moment and note some characteristics of the gradient descent process printed above.
dj_dw, and dj_db also get smaller, rapidly at first and then more slowly. As shown in the diagram from the lecture, as the process nears the ‘bottom of the bowl’ progress is slower due to the smaller value of the derivative at that point.A plot of cost versus iterations is a useful measure of progress in gradient descent. Cost should always decrease in successful runs. The change in cost is so rapid initially, it is useful to plot the initial decent on a different scale than the final descent. In the plots below, note the scale of cost on the axes and the iteration step.
# plot cost versus iteration
fig, (ax1, ax2) = plt.subplots(1, 2, constrained_layout=True, figsize=(12,4))
ax1.plot(J_hist[:100])
ax2.plot(1000 + np.arange(len(J_hist[1000:])), J_hist[1000:])
ax1.set_title("Cost vs. iteration(start)"); ax2.set_title("Cost vs. iteration (end)")
ax1.set_ylabel('Cost') ; ax2.set_ylabel('Cost')
ax1.set_xlabel('iteration step') ; ax2.set_xlabel('iteration step')
plt.show()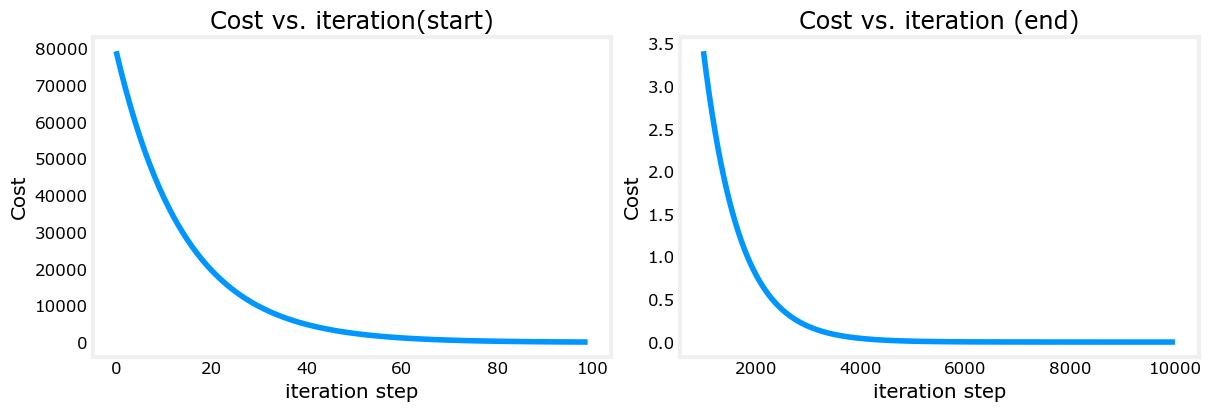
Now that you have discovered the optimal values for the parameters \(w\) and \(b\), you can now use the model to predict housing values based on our learned parameters. As expected, the predicted values are nearly the same as the training values for the same housing. Further, the value not in the prediction is in line with the expected value.
## Plotting You can show the progress of gradient descent during its execution by plotting the cost over iterations on a contour plot of the cost(w,b).
fig, ax = plt.subplots(1,1, figsize=(12, 6))
plt_contour_wgrad(x_train, y_train, p_hist, ax)
Above, the contour plot shows the \(cost(w,b)\) over a range of \(w\) and \(b\). Cost levels are represented by the rings. Overlayed, using red arrows, is the path of gradient descent. Here are some things to note: - The path makes steady (monotonic) progress toward its goal. - initial steps are much larger than the steps near the goal.
Zooming in, we can see that final steps of gradient descent. Note the distance between steps shrinks as the gradient approaches zero.
fig, ax = plt.subplots(1,1, figsize=(12, 4))
plt_contour_wgrad(x_train, y_train, p_hist, ax, w_range=[180, 220, 0.5], b_range=[80, 120, 0.5],
contours=[1,5,10,20],resolution=0.5)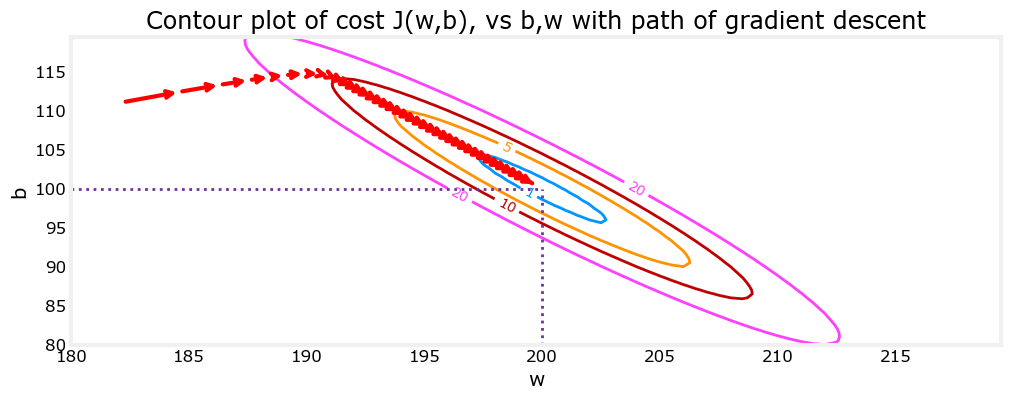
In the lecture, there was a discussion related to the proper value of the learning rate, \(\alpha\) in equation(3). The larger \(\alpha\) is, the faster gradient descent will converge to a solution. But, if it is too large, gradient descent will diverge. Above you have an example of a solution which converges nicely.
Let’s try increasing the value of \(\alpha\) and see what happens:
# initialize parameters
w_init = 0
b_init = 0
# set alpha to a large value
iterations = 10
tmp_alpha = 8.0e-1
# run gradient descent
w_final, b_final, J_hist, p_hist = gradient_descent(x_train ,y_train, w_init, b_init, tmp_alpha,
iterations, compute_cost, compute_gradient)Iteration 0: Cost 2.58e+05 dj_dw: -6.500e+02, dj_db: -4.000e+02 w: 5.200e+02, b: 3.20000e+02
Iteration 1: Cost 7.82e+05 dj_dw: 1.130e+03, dj_db: 7.000e+02 w: -3.840e+02, b:-2.40000e+02
Iteration 2: Cost 2.37e+06 dj_dw: -1.970e+03, dj_db: -1.216e+03 w: 1.192e+03, b: 7.32800e+02
Iteration 3: Cost 7.19e+06 dj_dw: 3.429e+03, dj_db: 2.121e+03 w: -1.551e+03, b:-9.63840e+02
Iteration 4: Cost 2.18e+07 dj_dw: -5.974e+03, dj_db: -3.691e+03 w: 3.228e+03, b: 1.98886e+03
Iteration 5: Cost 6.62e+07 dj_dw: 1.040e+04, dj_db: 6.431e+03 w: -5.095e+03, b:-3.15579e+03
Iteration 6: Cost 2.01e+08 dj_dw: -1.812e+04, dj_db: -1.120e+04 w: 9.402e+03, b: 5.80237e+03
Iteration 7: Cost 6.09e+08 dj_dw: 3.156e+04, dj_db: 1.950e+04 w: -1.584e+04, b:-9.80139e+03
Iteration 8: Cost 1.85e+09 dj_dw: -5.496e+04, dj_db: -3.397e+04 w: 2.813e+04, b: 1.73730e+04
Iteration 9: Cost 5.60e+09 dj_dw: 9.572e+04, dj_db: 5.916e+04 w: -4.845e+04, b:-2.99567e+04Above, \(w\) and \(b\) are bouncing back and forth between positive and negative with the absolute value increasing with each iteration. Further, each iteration \(\frac{\partial J(w,b)}{\partial w}\) changes sign and cost is increasing rather than decreasing. This is a clear sign that the learning rate is too large and the solution is diverging. Let’s visualize this with a plot.
plt_divergence(p_hist, J_hist,x_train, y_train)
plt.show()
Above, the left graph shows \(w\)’s progression over the first few steps of gradient descent. \(w\) oscillates from positive to negative and cost grows rapidly. Gradient Descent is operating on both \(w\) and \(b\) simultaneously, so one needs the 3-D plot on the right for the complete picture.